Phase Plane
Phase PlaneExpected Educational ResultsPhase PlaneDefinition: Linear Systems of DEsDefinition: Nonlinear Systems of DEsDefinition: 2D Phase PlaneNullclines in 2D Phase PlanesEquilibrium Solutions in 2D Phase PlanesDefinition: Equilibrium SolutionsPhase PortraitsDefinition: TrajectoryDefinition: Phase portraitClassification of Equilibrium PointsUnstable SaddleAsymptotically Stable NodeUnstable NodeStable CenterAsymptotically Stable SpiralUnstable SpiralEquilibrium Solutions in
Author: John J Weber III, PhD Corresponding Textbook Sections:
Section 5.4 – Introduction to the Phase Plane
Expected Educational Results
Objective 17–1: I can solve systems of linear differential equations using a phase plane.
Objective 17–2: I can determine the stability of linear systems.
Objective 17–3: I can analyze almost linear systems.
Objective 17–4: I can solve systems of linear differential equations using phase plane.
Objective 17–5: I can describe nonlinear systems.
Phase Plane
Definition: Linear Systems of DEs
A
Definition: Nonlinear Systems of DEs
A
Definition: 2D Phase Plane
The phase plane is the
Nullclines in 2D Phase Planes
Definition: Nullclines
Equilibrium Solutions in 2D Phase Planes
Definition: Equilibrium Solutions
Let
Solutions
Equilibrium points occur at the intersection(s) of the
Example 01:
Find the nullclines and equilibrium solutions for
Solution:
Find
Find
Find equilibrium solutions, solve for
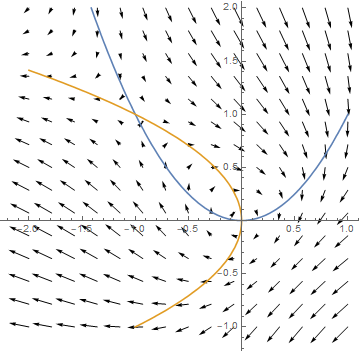
Here is the graph of the nullclines in the phase plane for the above system of DEs.
Phase Portraits
Definition: Trajectory
A trajectory is an implicit solution to an IVP of a system of DEs.
Definition: Phase portrait
A phase portrait is a plot of several solutions, i.e., trajectories, to the system of DEs.
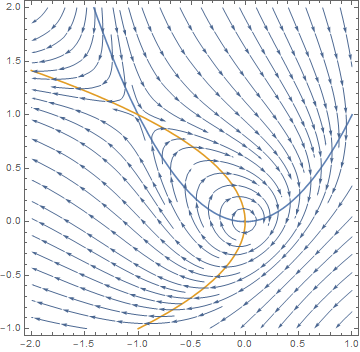
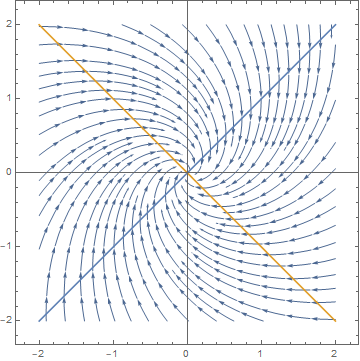
Here is the graph of the nullclines with several solution curves, i.e., trajectories, for the above system of DEs. Note the behavior of the solutions near the equilibrium solutions.
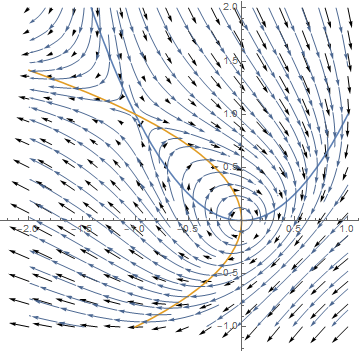
Here is the graph of the nullclines with several solution curves, i.e., trajectories, in the phase plane for the above system of DEs.
Classification of Equilibrium Points
Unstable Saddle

Asymptotically Stable Node

Unstable Node

Stable Center
Asymptotically Stable Spiral
Unstable Spiral

Equilibrium Solutions in
Let
Unstable Saddle
The eigenvalues of
Asymptotically Stable Node
The eigenvalues of
Unstable Node
The eigenvalues of
Stable Center
The eigenvalues of
Asymptotically Stable Spiral
The eigenvalues of
Unstable Spiral
The eigenvalues of
Defective Node
The eigenvalues of
Star Node
The eigenvalues of
Example 02:
Consider the system:
Solution:
NOTE: This system of DEs is non-linear since the first equation has
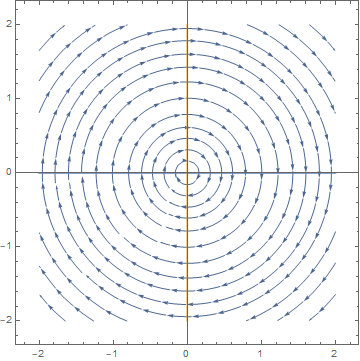
NOTE: The phase portrait of the system is:
1StreamPlot[{x1(3x1 + x2), 6x2}, {x1, -2, 2}, {x2, -2, 2}]
NOTE:
NOTE: By solving for all solutions to the three equations [nullclines]:
Investigation 01
For each system of DEs below, answer the following questions:
Identify if the system of DEs is a linear system of DEs. Explain.
If the system is linear, then identify the eigenvalues and corresponding eigenvectors for the system of DEs.
Use technology to sketch the phase portrait of the system in
Identify the nullclines for the system.
Identify and classify the equilibrium points of the system. Explain.
Classify the equilibrium points of the system. Explain.
Investigation 02
For each system of DEs below, answer the following questions:
Identify if the system of DEs is a linear system of DEs. Explain.
If the system is linear, then identify the eigenvalues and corresponding eigenvectors for the system of DEs.
Identify the nullclines for the system.
Identify and classify the equilibrium points of the system. Explain.
CC BY-NC-SA 4.0
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License [http://creativecommons.org/licenses/by-nc-sa/4.0/].
Last Modified: Thursday, 15 October 2020 6:42 EDT